
第一作者:Yeongin Kim, Alex Chortos, Wentao Xu
通讯作者:Zhenan Bao, Wentao Xu, Tae-Woo Lee
通讯单位:斯坦福大学、首尔大学、南开大学
研究亮点:
1.发展了一种基于柔性有机电子器件的高灵敏度仿生触觉神经系统,实现了对物体的运动、形状、质感的多重触觉感知,具有人脑特征。
3.构建了一种复合的生物电子反射弧。
让机器人拥有触觉,能够感知这个世界的温度、压力,甚至是使其具有神经活动,应该是机器人领域的科学家最希望实现的事情了。如何提高人工电子器件的多功能性、柔性、生物兼容性以及灵敏度,则是该领域亟待解决的问题。

早在2009年,Nature Materials报道了斯坦福大学鲍哲楠课题组关于感知微小压力的人造电子皮肤的研究成果。这种电子皮肤对于蝴蝶停留的微小压力也能够快速、高灵敏度感知,一时引起轰动。
2018年6月 1日,斯坦福大学鲍哲楠、首尔大学Tae-Woo Lee以及南开大学徐文涛团队联合在Science发文,报道了一种基于柔性有机电子器件的高灵敏度仿生触觉神经系统。
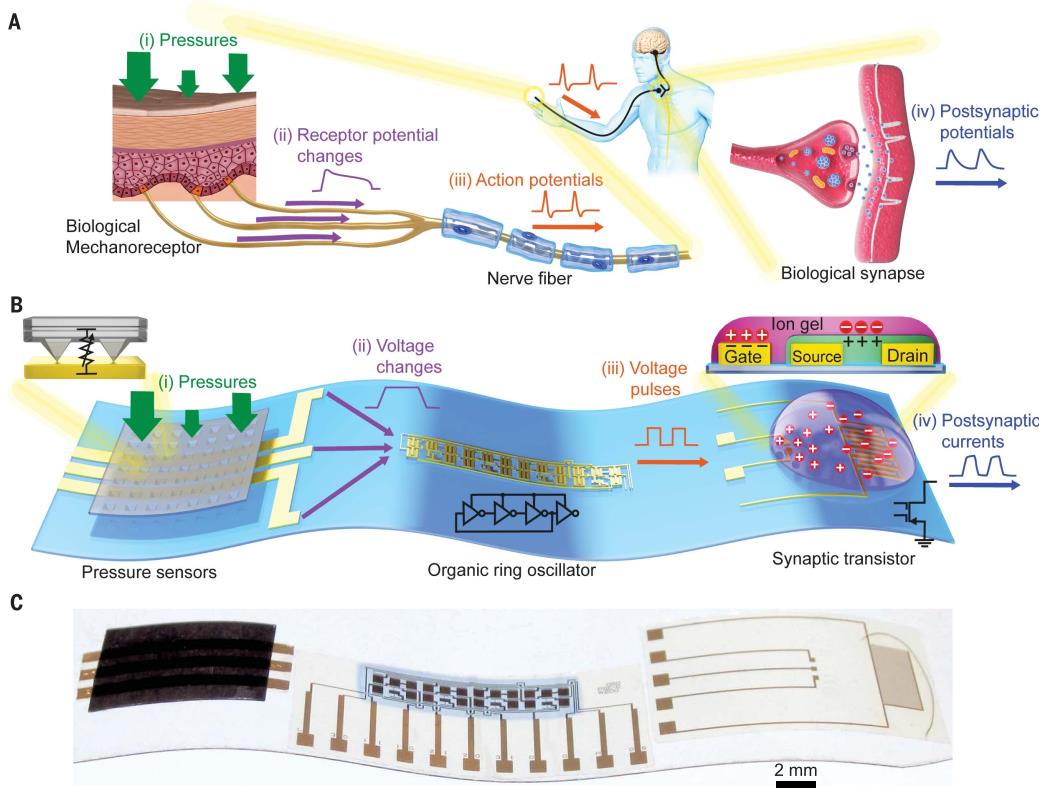
图1. 高灵敏度仿生柔性触觉神经系统
研究人员所开发的仿生触觉神经是模仿人体SA-I触觉神经,其主要原理是,从多个触感接收器接受信息,然后将这种信息运输到传出(马达)神经,完成一种复合的生物电子反射弧。
这种人工触觉神经由三个核心部件组成:1)电阻式压力传感器;2)有机环振荡器;3)突触晶体管。每一个压力传感都是一个触感接收器,所有的触感信息(1 to 80 kilopascals)收集在人工神经纤维(环振荡器)处,然后将外部触觉刺激转变成电信号(0 to 100 hertz)。从多个人工神经纤维得到的电信号集成到一起,经过突触晶体管转变为突触电流。而突触晶体管则可以用于构建生物触觉神经,形成完整的单突触反射弧。
这种人工神经触觉系统具有高灵敏度,即便是蟑螂腿的运动,也能快速感知。将在机器人手术、义肢感触等领域发挥重要作用!
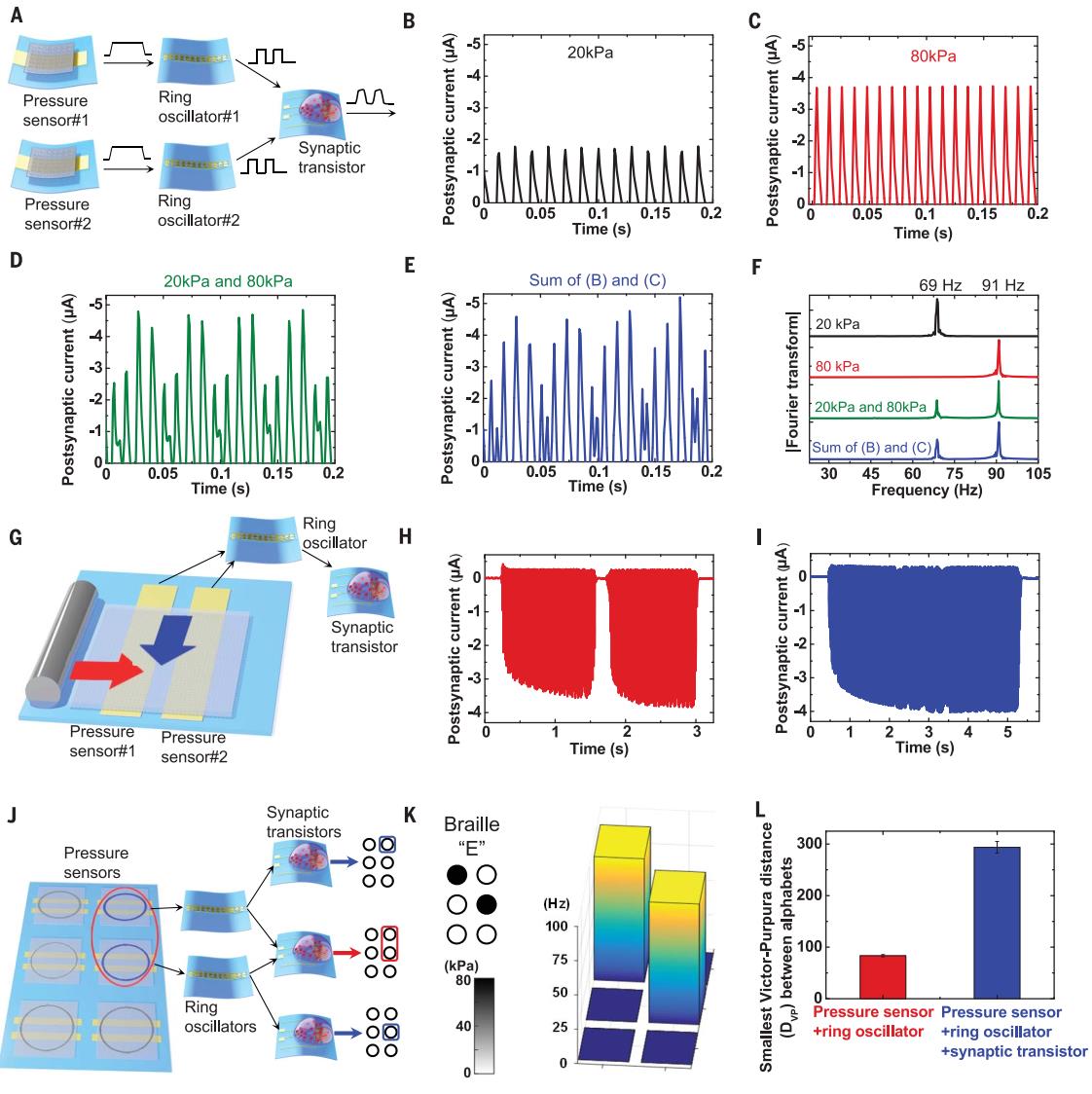
图2. 人工触觉神经系统的性能
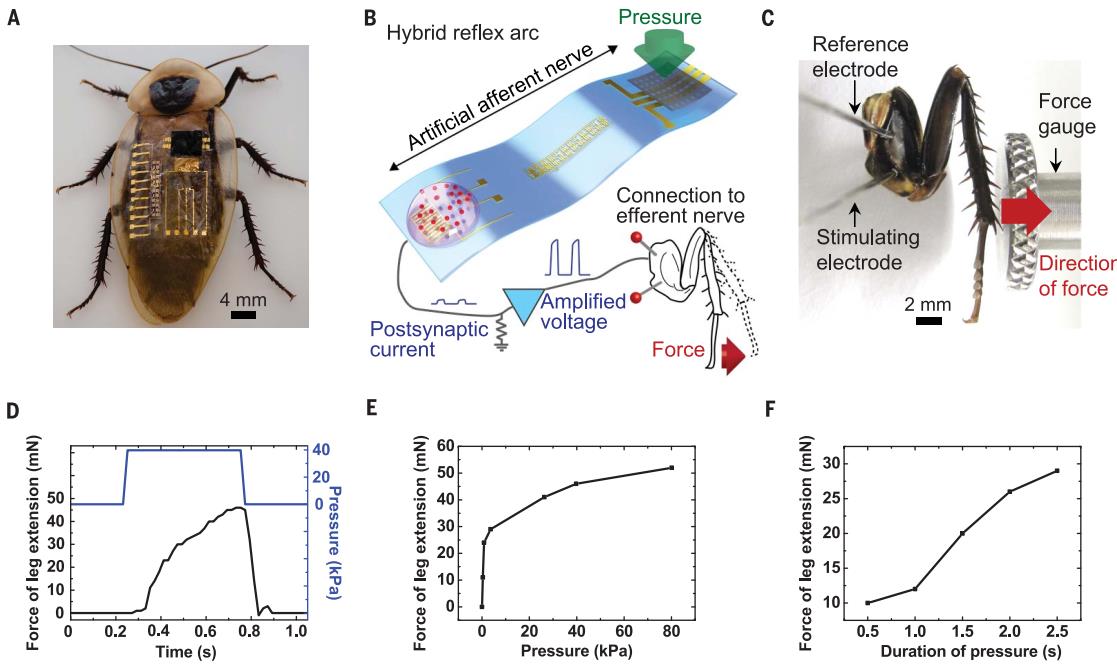
图3. 复合物反射弧
参考文献:
Yeongin Kim, Alex Chortos, Wentao Xu, Tae-Woo Lee, Zhenan Bao et al. A bioinspired flexible organic artificial afferent nerve. Science 2018, 360, 998-1003.










