能够在高度混乱的自然环境中飞行的飞行昆虫可以抵御飞行中的碰撞,这是因为它们的惯性低以及机翼,外骨骼和肌肉的弹性。当前的昆虫标尺(小于十厘米长,重量小于五克)的空中机器人使用刚性的微型标尺致动器,它们通常在外部冲击下易碎。能够进行大变形的仿生人造肌肉为致动提供了一种有希望的替代方法,因为它们可以承受由此类冲击引起的压力。但是,现有的软执行器尚未表现出足够的功率密度来实现提离,其执行非线性和有限的带宽为实现闭环提出了进一步的挑战。哈佛大学Yufeng Chen 和Robert J. Wood 团队开发了由柔软的人造肌肉驱动的空中飞行的机器人,该机器人表现出开环(由没有反馈的预定信号驱动),被动稳定(在飞行过程中直立)上升飞行以及闭环,盘旋飞行。机器人由多层介电弹性体致动器驱动,每个致动器重100mg,共振频率为500 Hz,功率密度为600 W/kg。为了增加执行器的机械功率输出并演示飞行控制,提出了克服软执行器特有挑战的方法。这些机器人可以感知和承受与周围障碍物的碰撞,并可以通过利用材料的坚固性和车辆的被动稳定性来从飞行中的碰撞中恢复过来。还在混乱的环境中同时驾驶两架微型飞机。它们与墙相互碰撞,而不会受到损坏。这些机器人依靠船外放大器和外部运动捕捉系统为介电弹性体执行器提供动力并控制其飞行。
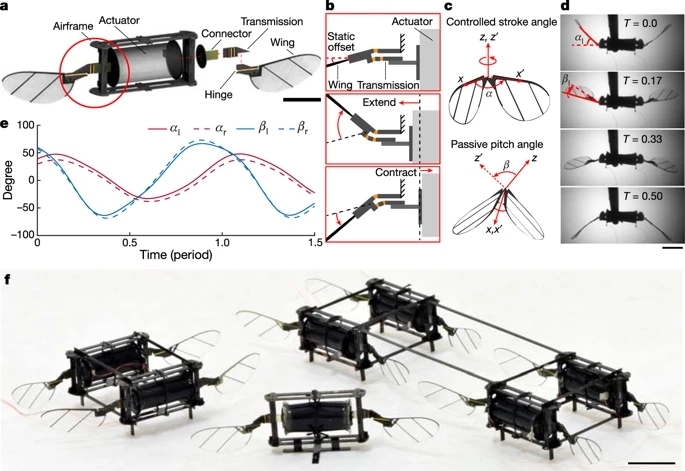
Controlled flight of a microrobot powered by soft artificial muscles,Nature (2019)
https://www.nature.com/articles/s41563-019-0518-x