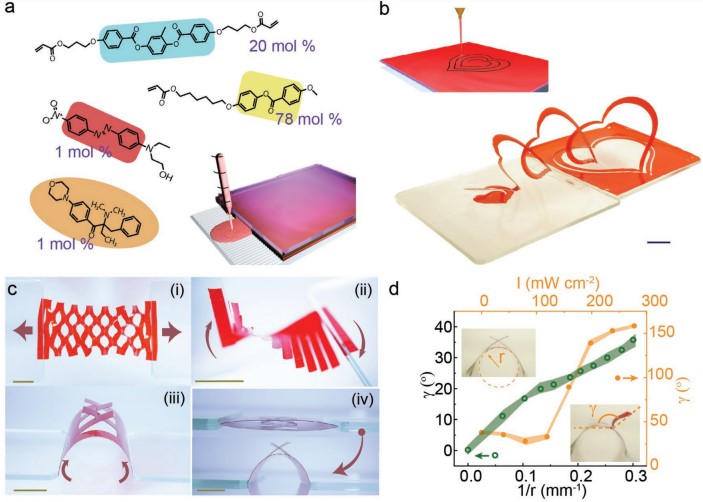
刺激响应软致动器的开发是材料科学家们主要承担的一项任务,它已成为推动微机器人技术前沿的主要动力。由软活性材料制成的设备通常体积较小,可以远程无线供电/控制,并且能够适应意料之外的障碍。然而,目前大多数的软微型机器人在设计和结构上都比较简单,如何制作具有刺激响应特性的复杂三维软机器人仍然是一个挑战。近日,台湾国立台北科技大学Yu-Chieh Cheng和芬兰坦佩雷大学Hao Zeng的研究小组合作,基于kirigami的技术制造了复杂的3D机器人结构,这些结构可以被光激活。由液晶网络构成的kirigami薄膜驱动器的外部应力场引入了平面外变形。这种2D到3D的结构转换可以在光照下产生机械驱动,从而实现基于kirigami的光驱动机器人。摘要介绍了一种利用光束控制多步态运动并在二维范围内控制运动方向的光滚机器人。该设备可以沿着不同的路线导航,并沿着斜坡向上移动,斜坡坡度为6°。结果表明,利用光激活机器人功能可以实现复杂而灵活的三维结构。
Yu‐Chieh Cheng, Hao‐Chuan Lu, Xuan Lee, et al. Kirigami‐Based Light‐Induced Shape‐Morphing and Locomotion. Advanced Materials, 2019.
DOI: 10.1002/adma.201906233
https://onlinelibrary.wiley.com/doi/full/10.1002/adma.201906233

















