生物能够通过反射驱动的途径感知和响应环境。在微型机器人中模拟这种自然智能的最大挑战在于实现高度集成的身体功能、驱动和传感机制。于此,新加坡国立大学Ghim Wei Ho等人提出了基于智能薄膜复合材料的体感光驱动机器人(SLiR),该材料紧密集成了驱动和多传感功能。
本文要点:
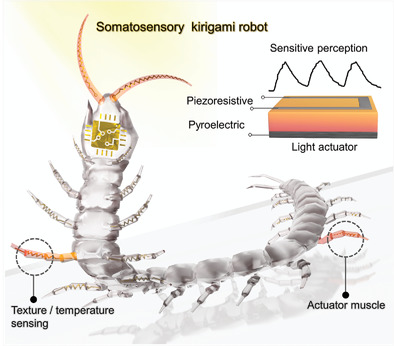
1)SLiR包含了光致动器换能器下的热/压电响应和压阻应变感,可同时感知其体温和致动变形状态,而不会对其产生干扰。当与kirigami(一种日本古老的剪纸艺术)结合时,紧凑的薄膜有助于快速定制可变形、移动和多机器人功能的低高度结构。例如,SLiR步行者可以在不同的表面上向前移动,同时对其详细的机车步态和微妙的地形纹理提供反馈,SLiR拟人手显示出协调的机械感受、热感受、本体感受和光感受产生的身体感觉。
2)还演示了用SLiR蜈蚣进行的无张力操作,它可以执行从定向运动、多角度到无线人与环境交互的不同的、局部的身体功能。这种具有综合感知和运动能力的SLiR,为在软机器人中发展多种智能行为提供了新的机会。
Wang, X.‐Q., et al., Somatosensory, Light‐Driven, Thin‐Film Robots Capable of Integrated Perception and Motility. Adv. Mater. 2020, 2000351.
DOI: 10.1002/adma.202000351
https://doi.org/10.1002/adma.202000351

















