在各种体内/体外生物医学环境中,软微机器人是一种很有前景的新兴应用的候选者。尽管最近其在设计和驱动方面均取得了成功,但由于缺乏感知能力,因此距离实际应用还很遥远。在此,香港城市大学Yajing Shen,Zhengbao Yang等人报道了一种基于射频识别(RFID)的无电池软机器人,它可以通过耦合磁效应和压电效应实现远程移动、感测和通信。
本文要点:
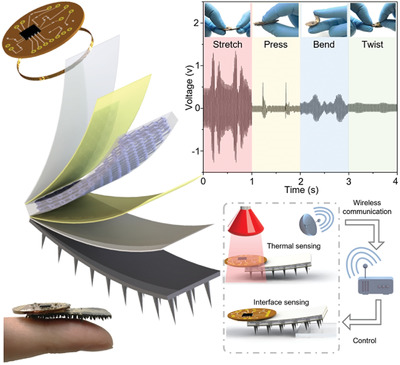
1)本设计将机器人的驱动和发电单元集成在一个薄的多层薄膜(<0.5 mm)中,即装饰有多只脚的低磁复合肢体提供运动,柔性压电陶瓷复合薄膜同时回收能量。
2)在外磁引导触发下,此微机器人在无需任何车载电池或外部有线电源情况下,即可实现远程移动、环境监测和无线通信。
3)此外,此机器人还分别通过两种不同的传感模式,即搭载式和内置式,展示了其在测量环境温度和接触界面的传感能力。
此研究代表了无栓软机器人这一新兴领域的显著进展,有利于其在体内监测、诊断和药物递送等方面的广阔应用。
Haojian Lu, et al. Battery‐Less Soft Millirobot That Can Move, Sense, and Communicate Remotely by Coupling the Magnetic and Piezoelectric Effects. Adv. Sci., 2020.
DOI: 10.1002/advs.202000069
https://doi.org/10.1002/advs.202000069

















