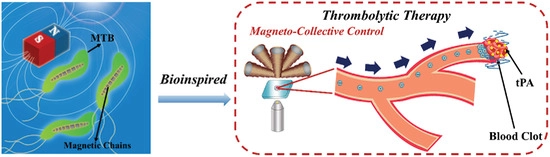
用于生物医学应用的新时代软微机器人需要模拟自然界生物的基本结构和集体功能。生物相容性界面、智能功能和精确的运动控制是设计适应复杂生物环境的软微机器人的关键参数。在此,同济大学何斌、Qigang Wang、Yu Cheng等人以趋磁细菌(MTB)为灵感,研制了一种运动响应快、定位准确的仿生磁性微机器人(BMM),用于靶向溶栓。
本文要点:
1)与MTB中的磁小体结构类似,BMM由嵌入在非溶胀微凝胶壳中的排列有序的氧化铁纳米颗粒(MNP)链组成。
2)在静磁场作用下,由于MNPs颗粒间的偶极相互作用,BMMs中的线性链得以实现。
3)模拟结果表明,组装的程度和速度与场强成正比。BMM最大速度可达161.7µm s−1,在旋转磁场下实现精确定位控制,偏差小于4%。
4)重要的是,BMMs的运动分析表明,在8Hz下存在频率相关同步,而在更高的频率下,由于阻力矩的增加,则存在异步化现象。BMMs可通过磁集体控制输送和释放溶栓药物,有望用于超微创溶栓治疗。
Meihua Xie, et al. Bioinspired Soft Microrobots with Precise Magneto‐Collective Control for Microvascular Thrombolysis, Adv. Mater., 2020.
DOI: 10.1002/adma.202000366
https://doi.org/10.1002/adma.202000366

















