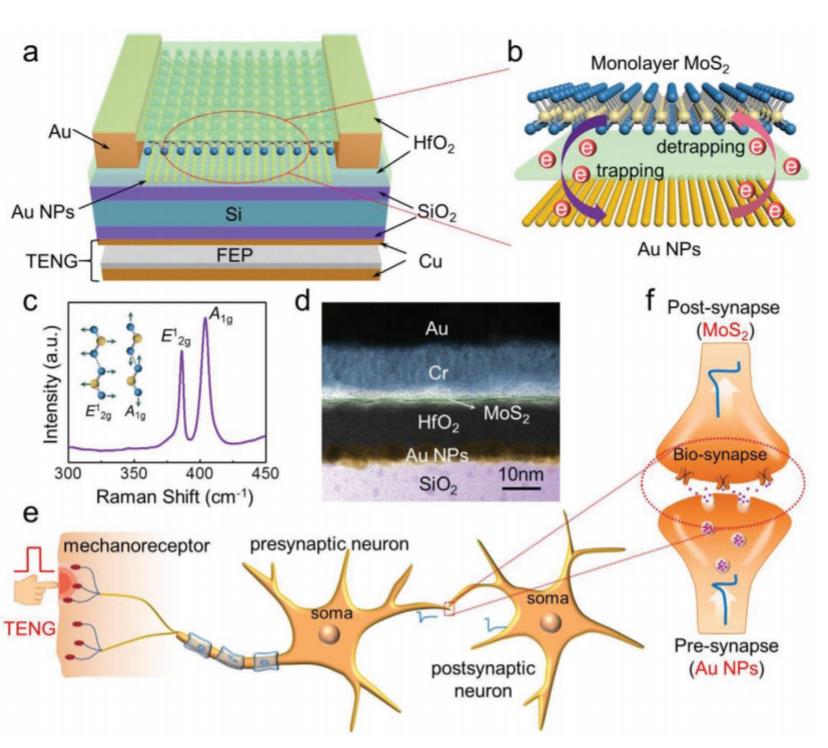
模拟突触可塑性以实现复杂的认知功能和适应性行为对于神经形态计算和人工智能的发展至关重要。为了在神经形态系统中实现可比的,多功能的和主动的认知复杂性,迫切需要更可行的塑性策略(例如,机械可塑性)。于此,中国科学院北京纳米能源与系统研究所王中林院士、孙其君等人提出了一种基于摩擦电子浮栅MoS2突触晶体管的通用机械塑性人工突触。
本文要点:
1)机械位移会引起摩擦电势耦合到浮栅突触晶体管上,触发突触后电流信号,并调节突触权重,从而以主动和交互的方式实现突触的机械可塑性。成功地模仿了典型的突触可塑性行为,包括增强/抑制和成对的脉冲促进/抑制。在浮栅电荷俘获的辅助下,人工突触可以同时实现机械位移引起的短期和长期塑性。
2)还构建了一个简便的人工神经网络,以通过机械塑性表现出增加的突触权重和神经形态逻辑切换(AND,OR),而无需构建复杂的互补金属氧化物半导体电路。所提出的机械塑性人工突触为构造机械行为衍生的神经形态装置提供了一个有利的候选方案,以克服von Neumann瓶颈并执行高级突触行为。
Yang, X., et al., Mechanoplastic Tribotronic Floating‐Gate Neuromorphic Transistor. Adv. Funct. Mater. 2020, 2002506.
https://doi.org/10.1002/adfm.202002506

















