软机器人技术的出现使得机器人、可穿戴设备甚至制造工艺都有了很大的进步,它采用了完全柔软的系统,可以与任何随机表面安全交互,同时提供了良好的机械柔顺性。此外,软机器人技术的最新发展涉及到透明的软执行器和传感器的进步,使得我们制造出能够在视觉和机械上畅通无阻地工作的机器人成为可能,从而协助了机器人的操作,并在各个领域创造更多的应用。在这方面,以光学透明的不可感知硬件组件为主的不可感知软机器人将成为未来软机器人时代的一个新的研究热点。
综述要点:
首尔大学Seung Hwan Ko等人介绍了扩展的无法察觉的软机器人技术的最新进展,包括无法察觉的透明软机器人(透明软执行器/传感器)和无法察觉的非透明伪装皮肤。讨论了它们的原理、材料选择和工作机制,以便探索在不可察觉的软机器人系统中的关键挑战和前景。
以下为部分图文信息:
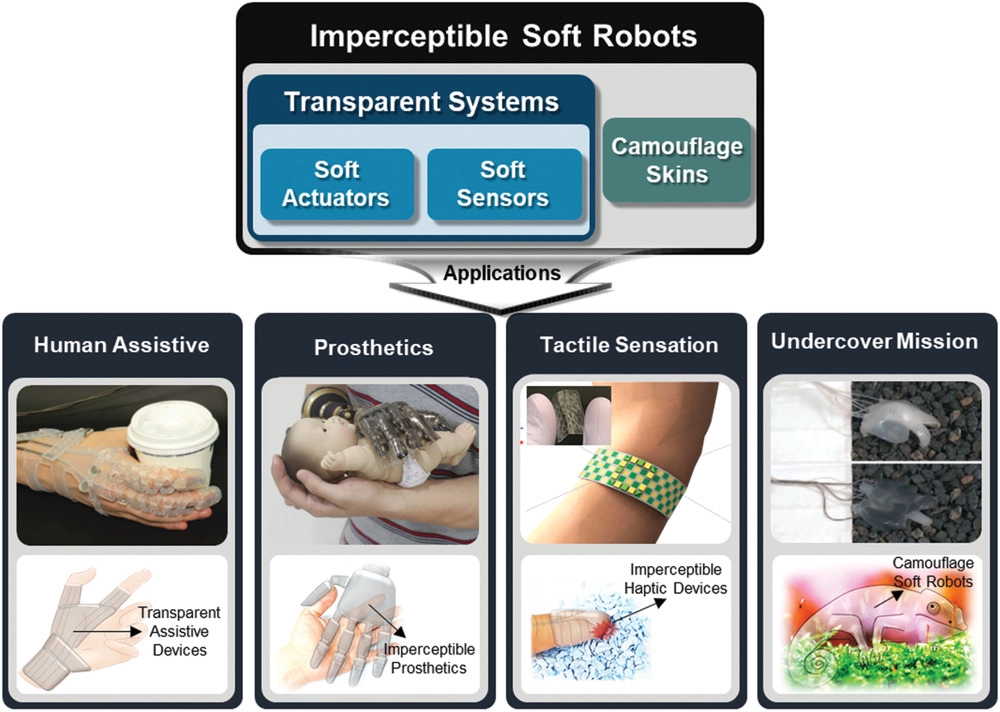
不可觉察的软机器人系统图
 不可觉察的软机器人的组成
不可觉察的软机器人的组成
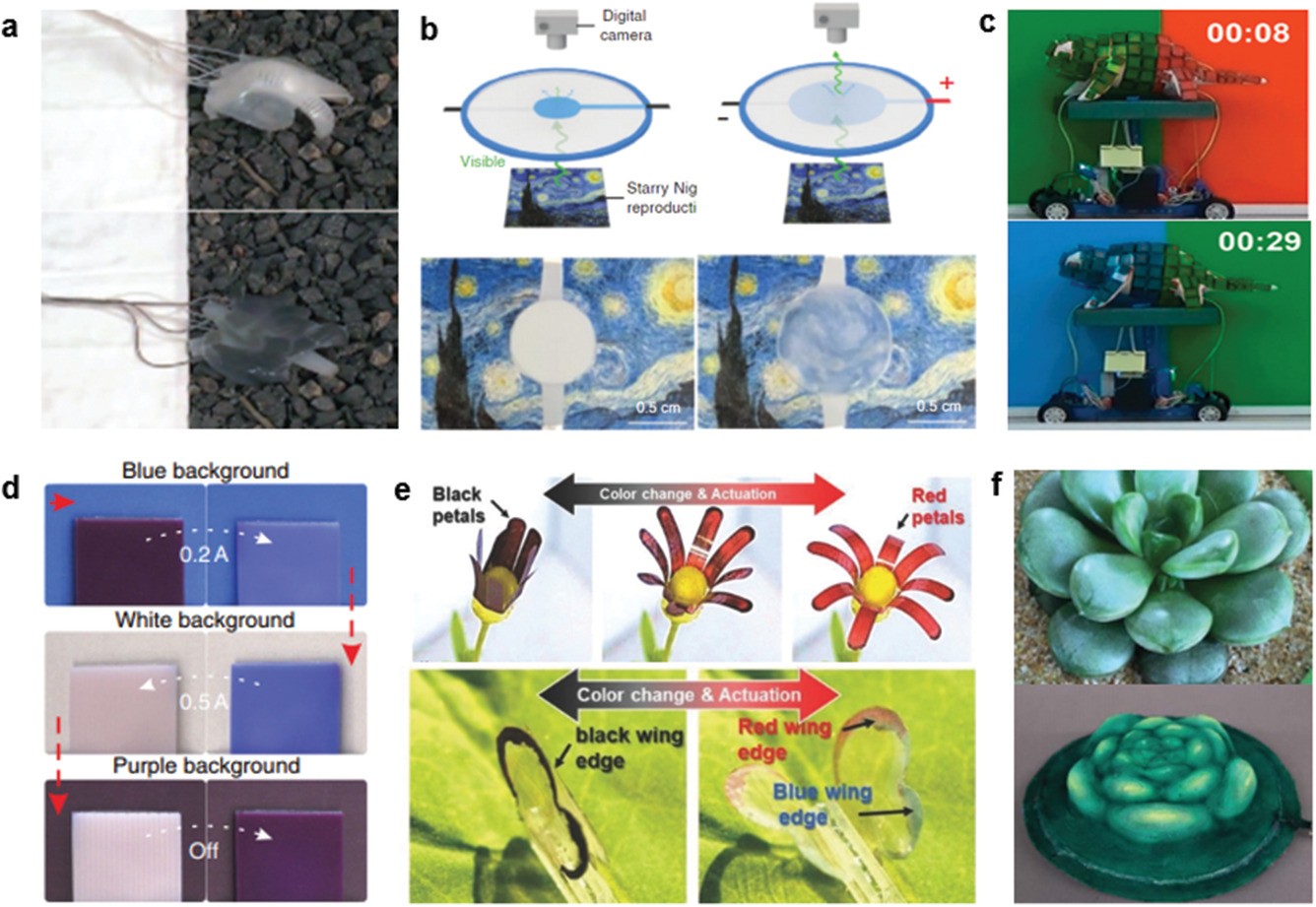 可伪装皮肤材料的进展
可伪装皮肤材料的进展
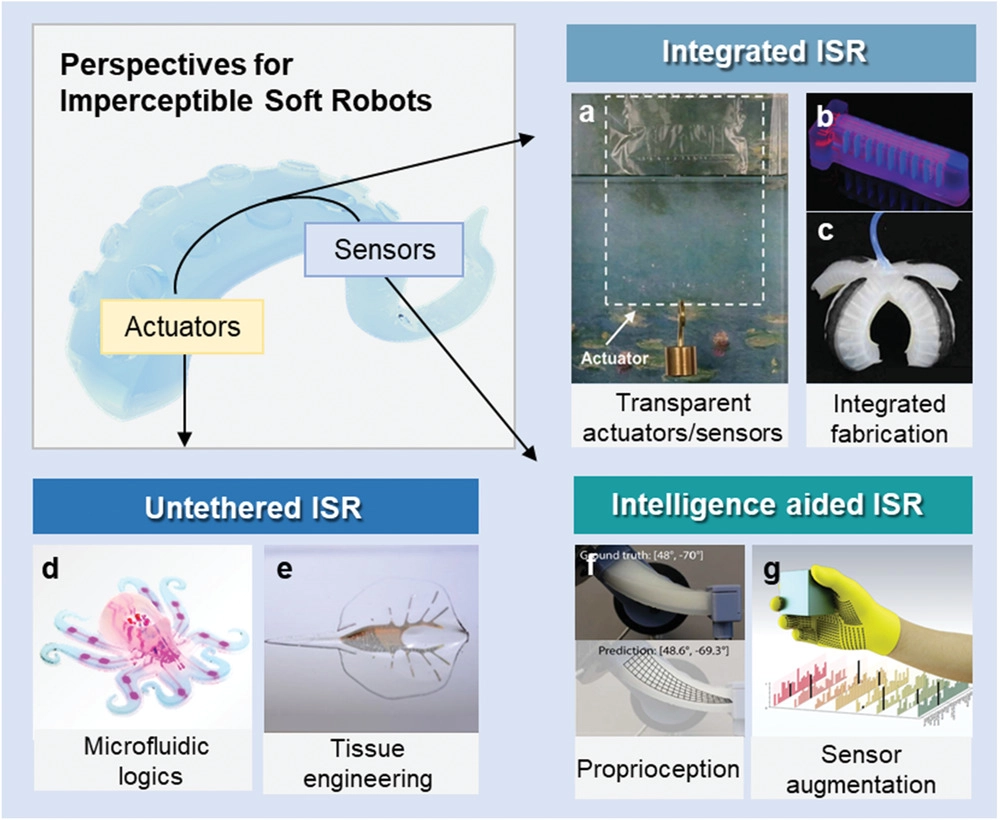 不可觉察的软机器人的展望
不可觉察的软机器人的展望
参考文献:
Won, P., et al., Transparent Soft Actuators/Sensors and Camouflage Skins for Imperceptible Soft Robotics. Adv. Mater. 2020, 2002397.
https://doi.org/10.1002/adma.202002397

















