对于以人为中心的设备和需要与环境温和互动的系统来说,软机器是一个很有前途的设计范例。为了使软机器能够智能地响应周围环境,需要顺应的感觉反馈机制。具体地说,应变计的软替代品,即在低应变(不到5%)下具有高分辨率,有望释放软系统中有前途的新功能。然而,目前可用的传感机制通常要么具有高应变敏感性,要么具有高机械弹性,而非两者兼具。弹性和顺应性超灵敏传感机制的缺乏严重限制了其在实验室环境下的运行,并阻碍了它们的商业化。
有鉴于此,美国哈佛大学 Robert J. Wood,Oluwaseun A. Araromi报道了一种基于各向异性电阻结构(SCAR)中应变中介接触的高灵敏度应变检测的通用且顺应性的传感机制。
文章要点
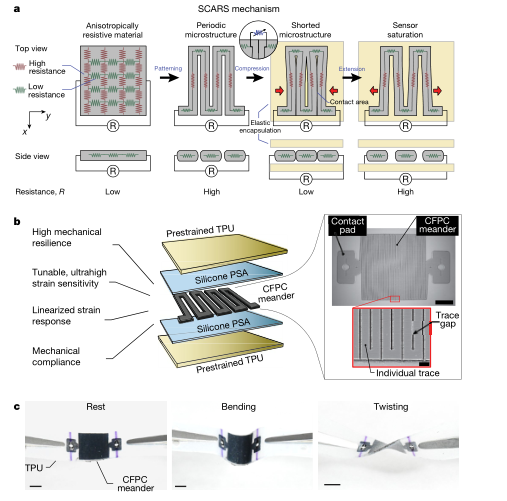
1)这一机制依赖于由可拉伸薄膜包裹的坚硬、微结构、各向异性导电弯管之间欧姆接触的变化。SCAR实现了高灵敏度,量规系数大于85,000,同时适用于高强度导体,从而获得对不利负载条件有顺应性的传感器。此外,该传感机制还表现出高度的线性度,以及对弯曲和扭曲变形的不敏感性,这些特征对于软机器的应用至关重要。
2)基于该传感机制,研究人员构建了一种集成了传感器的、轻便的、基于纺织品的手臂袖子,它可以识别手势,而不会阻碍手。并通过检测手臂上的小肌肉运动,展示了对离散手势和连续手势的预测性跟踪和分类。手臂袖子展示了SCARS技术在开发不显眼、可穿戴的生物力学反馈系统和人机界面方面的潜力。
Araromi, O.A., Graule, M.A., Dorsey, K.L. et al. Ultra-sensitive and resilient compliant strain gauges for soft machines. Nature 587, 219–224 (2020).
DOI:10.1038/s41586-020-2892-6
https://doi.org/10.1038/s41586-020-2892-6


















