软执行器在软机器人、传感器、智能控制、人工智能、视觉智能等领域受到了广泛的关注。通过拉伸变形和扭转变形的组合,可以实现不同类型的运动,如弯曲、滚动和跳跃。软机器人需要软执行机构,如人工肌肉来提升或移动物体来执行某些工作。此外,先进智能系统的发展还需要集传感、信号传输和控制功能于一体的致动器,这进一步刺激了对多功能致动器的需求。
综述要点:
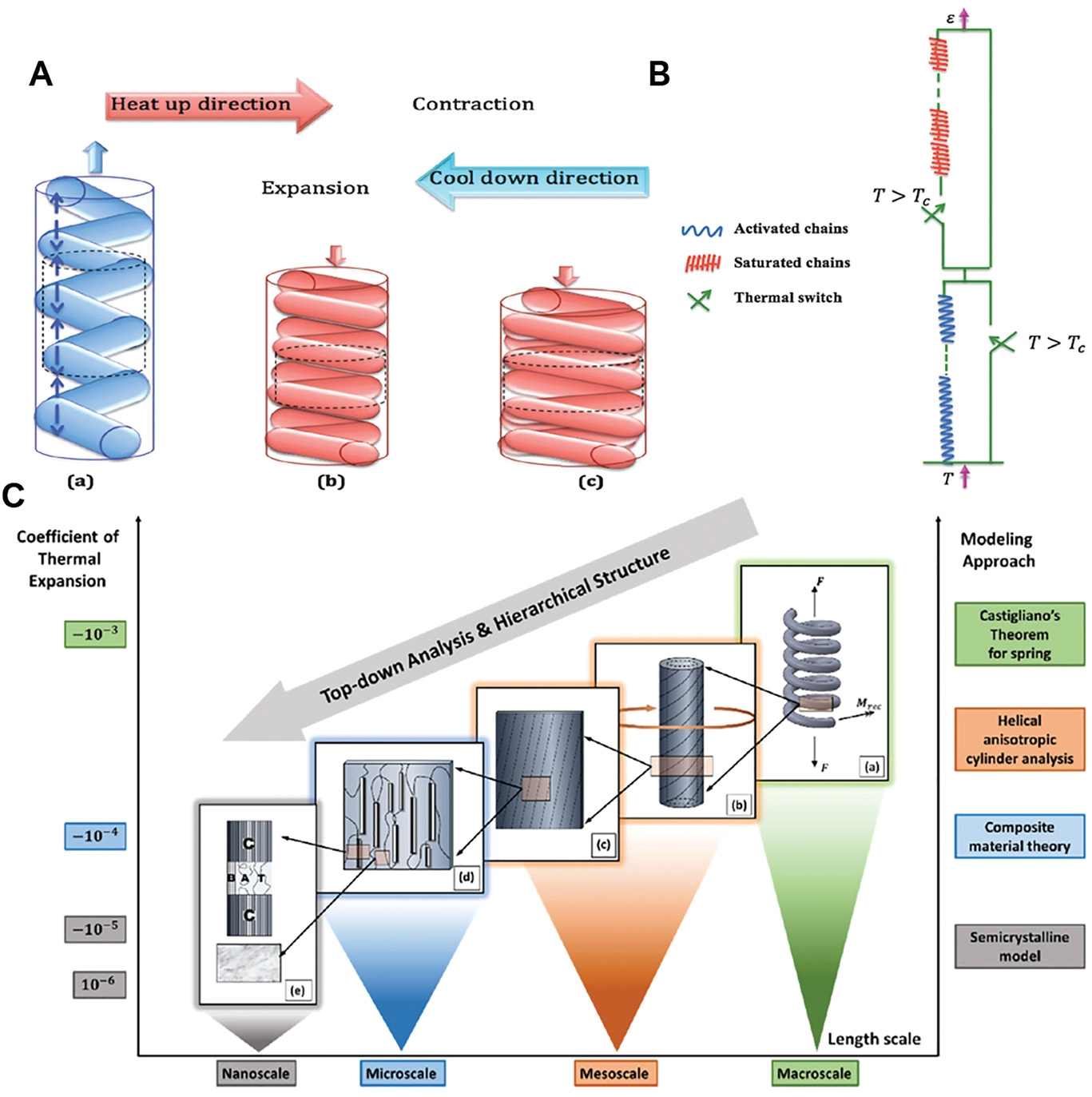
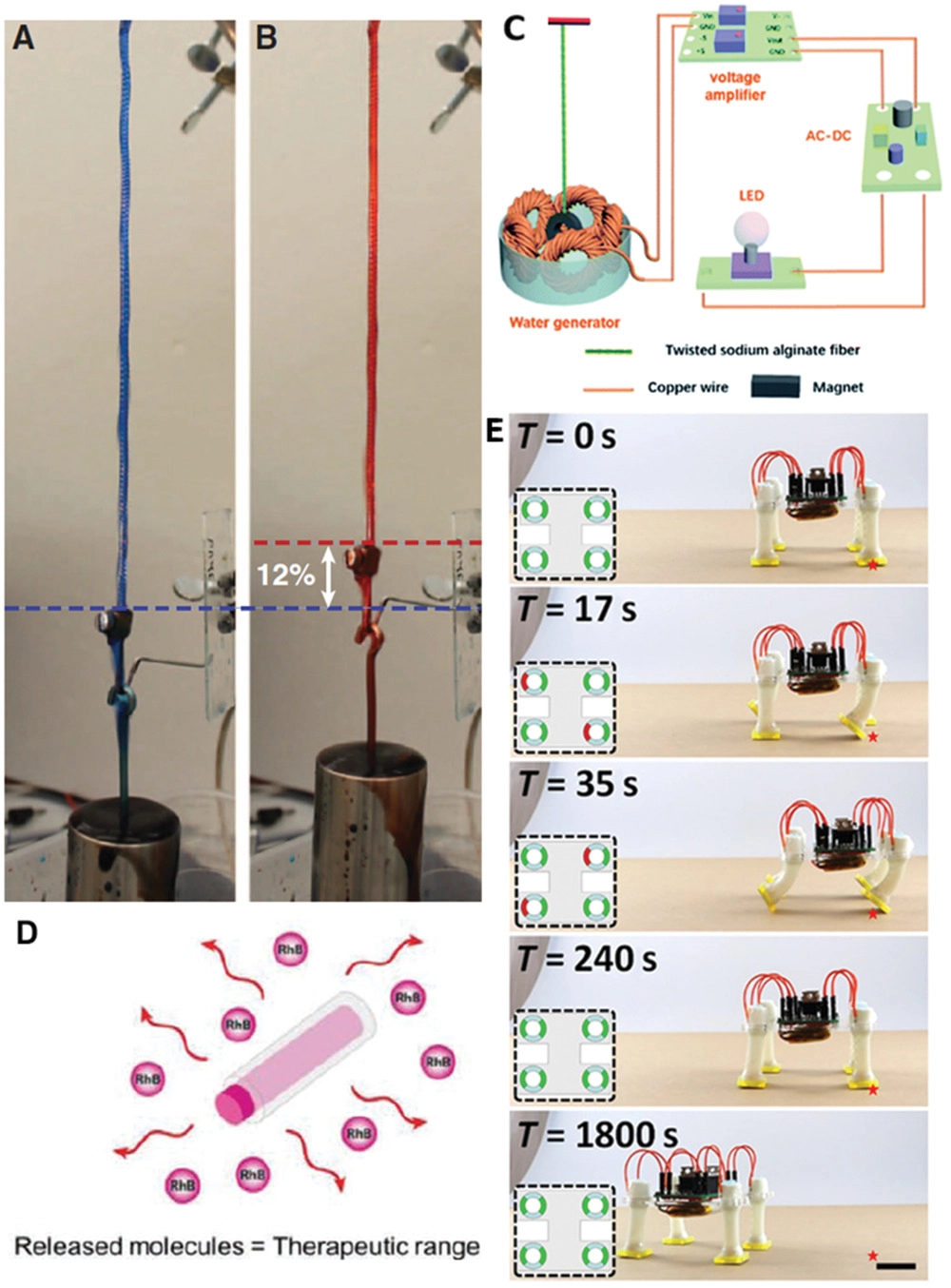
1)南开大学刘遵峰、中国药科大学周湘等人综述了可实现拉伸和扭转驱动的各种软致动器,包括扭曲纤维人工肌肉、形状记忆聚合物、水凝胶、液晶聚合物、导电聚合物电化学致动器,以及一些天然材料。还包括关于所述致动器的用于提升物体的弯曲或卷起变形的示例。
2)然后,总结了近年来有关多功能软执行器结合传感和信号传输性能的研究成果。最后,总结了实现拉伸和扭转驱动的不同方法、不同材料、提升或移动物体的设计以及具有驱动和传感功能的多功能致动器的构造。
参考文献:
Zou, M., et al., Progresses in Tensile, Torsional, and Multifunctional Soft Actuators. Adv. Funct. Mater. 2021, 2007437.
https://doi.org/10.1002/adfm.202007437

















