在这些示例的指导下,研究人员最近开发了多种策略来克服使用机械不稳定性的软机器人中的速度和功率限制。通过从结构稳定状态的快速过渡,这些机械不稳定性提供了一种新途径,以实现高输出功率放大并获得令人印象深刻的促动速度。
综述要点:
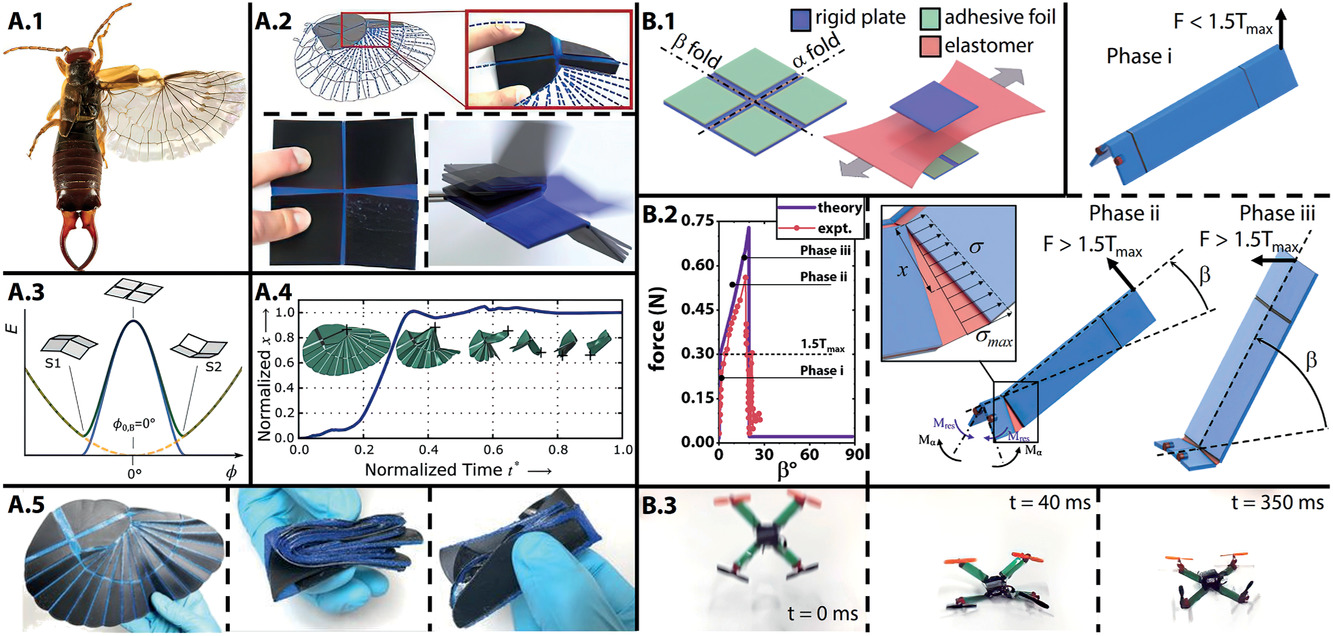
1)鉴于此,普渡大学Ramses V. Martinez等人对与软机器人和致动器的开发有关的文献进行了概述,这些软机器人和致动器利用机械不稳定性来扩展其致动速度、输出功率和功能。
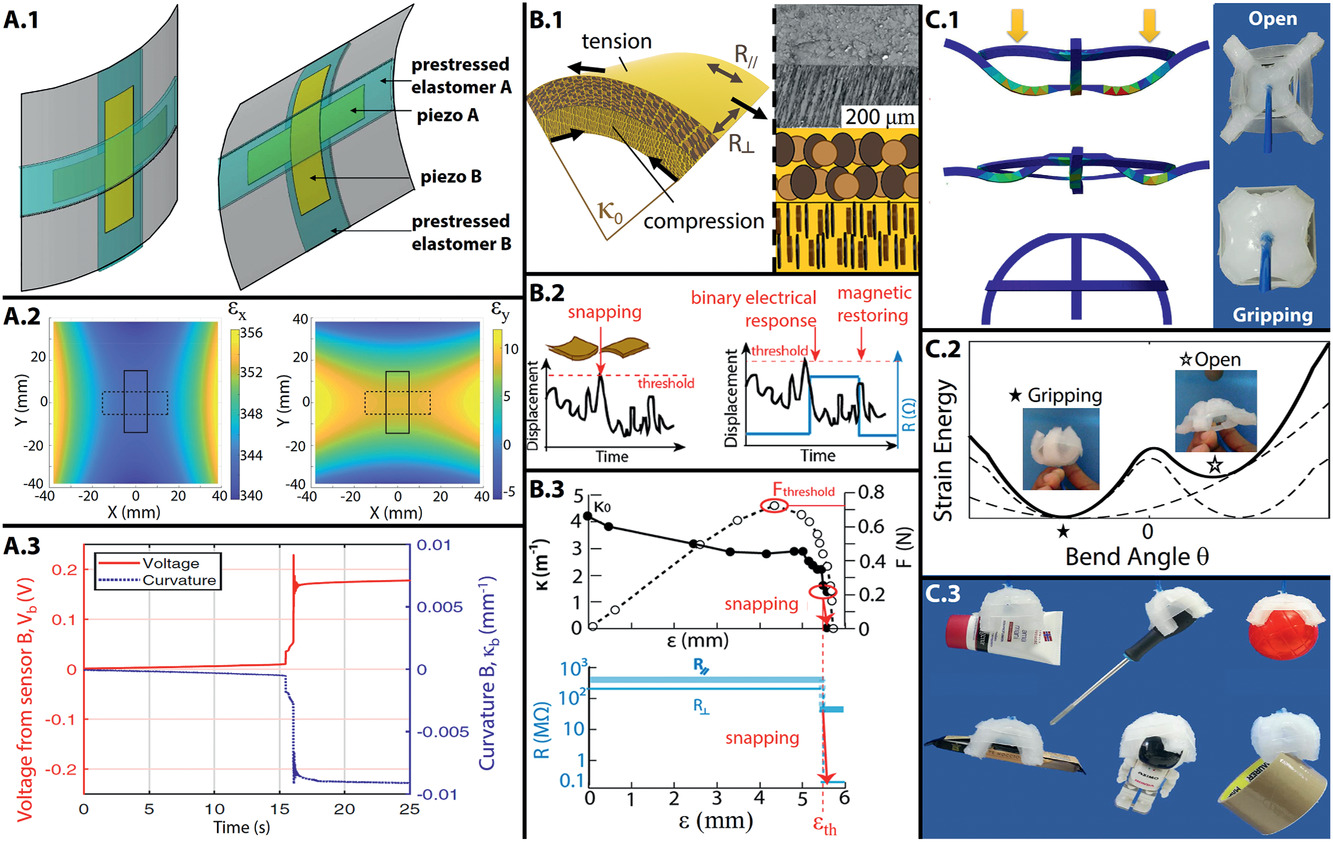
2)此外,研究人员还讨论了使用结构相变解决软机器人控制、传感和驱动领域当前挑战的策略。还回顾了使用不稳定性创建完全软逻辑模块以使软机器人具有材料智能和分布式计算能力的方法。
参考文献:
Pal, A., et al., Exploiting Mechanical Instabilities in Soft Robotics: Control, Sensing, and Actuation. Adv. Mater. 2021, 2006939.
https://doi.org/10.1002/adma.202006939

















