人造肌肉可以对外界刺激进行可逆收缩/扩张、弯曲或旋转,在各种应用中显示出巨大的潜力,例如软机器人、假肢和微流体的微型致动器。尽管电磁马达长期以来一直用于驱动机器人和假肢设备,但这些致动器的刚性和笨重的特性限制了它们在较小的足迹中提供大的收缩行程。由大量水组成的水凝胶类似于生物软组织,但其较弱的机械性能阻碍了其实际应用。
近日,武汉大学常春雨报道了提出了一种简单而有效的策略,成功制备出具有大行程和形状记忆特性的卷须状水凝胶人工肌肉。
文章要点
1)实现这种合理设计的关键是将被囊状纤维素纳米晶体(TCNC)结合到聚合物网络中,以增强可以耐受后续成型过程的水凝胶。首先,在β-环糊精修饰的囊状纤维素纳米晶(β-CD−TCNCs)存在下,通过聚合单体[丙烯酰胺(AAm)、丙烯酸(AAc)和金刚烷基丙烯酰胺(Ad-AAm)]制备了一种高伸长的原始水凝胶。由于水凝胶网络中的动态主−客体相互作用,原始水凝胶能够经受住成型过程(拉伸、扭曲和卷曲)。
2)通过Fe3+/−CoO−离子配位,将成型的水凝胶浸泡在FeCl3水溶液中,获得了一种卷须状水凝胶人工肌肉,其含水量约为50%,间距均匀。通过在塑形过程中,对扭体和线圈手性的控制,实现了异型手性和同型手性肌肉的开发。
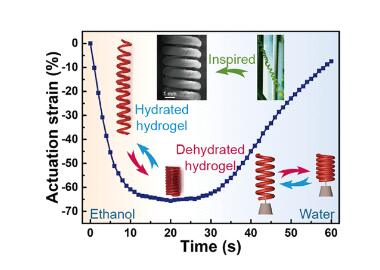
3)这些水凝胶肌肉响应于溶剂表现出高驱动率、大驱动应变和形状记忆特性。同时,水凝胶肌肉的驱动性能受其手性、扭曲密度、施加的应力和临时形状的影响。此外,具有临时形状II的同手性水凝胶肌肉显示出与天然肌肉相当的收缩工作能力,可用作驱动汽车模型运动的发动机。
这项工作展示了一种简单有效的制备水凝胶人工肌肉的策略。由于水凝胶人工肌肉的含水量和收缩工作能力与天然肌肉相当,因此在生物医学领域具有巨大的应用潜力。
参考文献
Yande Cui, et al, Bioinspired Shape Memory Hydrogel Artificial Muscles Driven by Solvents, ACS Nano, 2021
DOI: 10.1021/acsnano.1c05019
https://doi.org/10.1021/acsnano.1c05019


















