胶体微马达可以自主推进,这是因为它们打破了对称性,导致局部机械力不平衡。最常见的是,微马达被合成为具有Janus结构或其变体,有两个在形状、成分或表面上不同的组件在相对的一面连接在一起。有鉴于此,香港大学的Yufeng Wang等研究人员,开发出金属-有机框架的多面体微马达。
本文要点
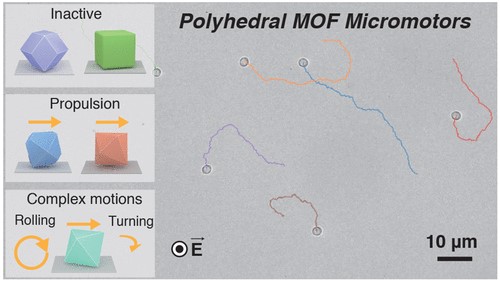
1)研究人员报告了另一种创造微马达的方法,在交流电场下,具有各种多面体形状的金属有机框架(MOF)的微晶体被推进。
2)在这些情况下,对称性的打破是通过将多面体颗粒定向到一个独特的方向来产生不均匀的电液动力流。
3)粒子的方向是由施加在粒子上的电力和引力之间的微妙竞争控制的,研究人员用实验和理论模型进行了解释。
4)通过利用MOF的类型和形状,或表面特性,研究人员表明MOF电机的推进力可以被调整或逆转。
由于MOF设计的灵活性和其一步可扩展的合成,本文研究的策略对于制造精准设计的功能性微马达来说是简单而通用的。
参考文献:
Zhisheng Wang, et al. Polyhedral Micromotors of Metal–Organic Frameworks: Symmetry Breaking and Propulsion. JACS, 2020.
DOI:10.1021/jacs.1c09439
https://pubs.acs.org/doi/10.1021/jacs.1c09439

















