自然界中的生物体为了完成复杂任务能够相互协作,受到自然界的启发,捷克布尔诺理工大学Martin Pumera等人开发了协作的微型纳米机器人。本文介绍了不同形状的基于赤铁矿的微型机器人的自发组装。
本文要点:
(1)采用水热合成法制备了立方形和胡桃状的赤铁矿/铂微型机器人,然后在表面沉积一层铂形成Janus结构,其具有自主运动光驱动的特性。在光照条件下,这两种微型机器人都能在无燃料的情况下进行运动。由于晶体中磁偶极矩的不对称取向,立方赤铁矿/铂微型机器人可以自组装成有序的微链,这与胡桃状微型机器人的随机聚集相反。
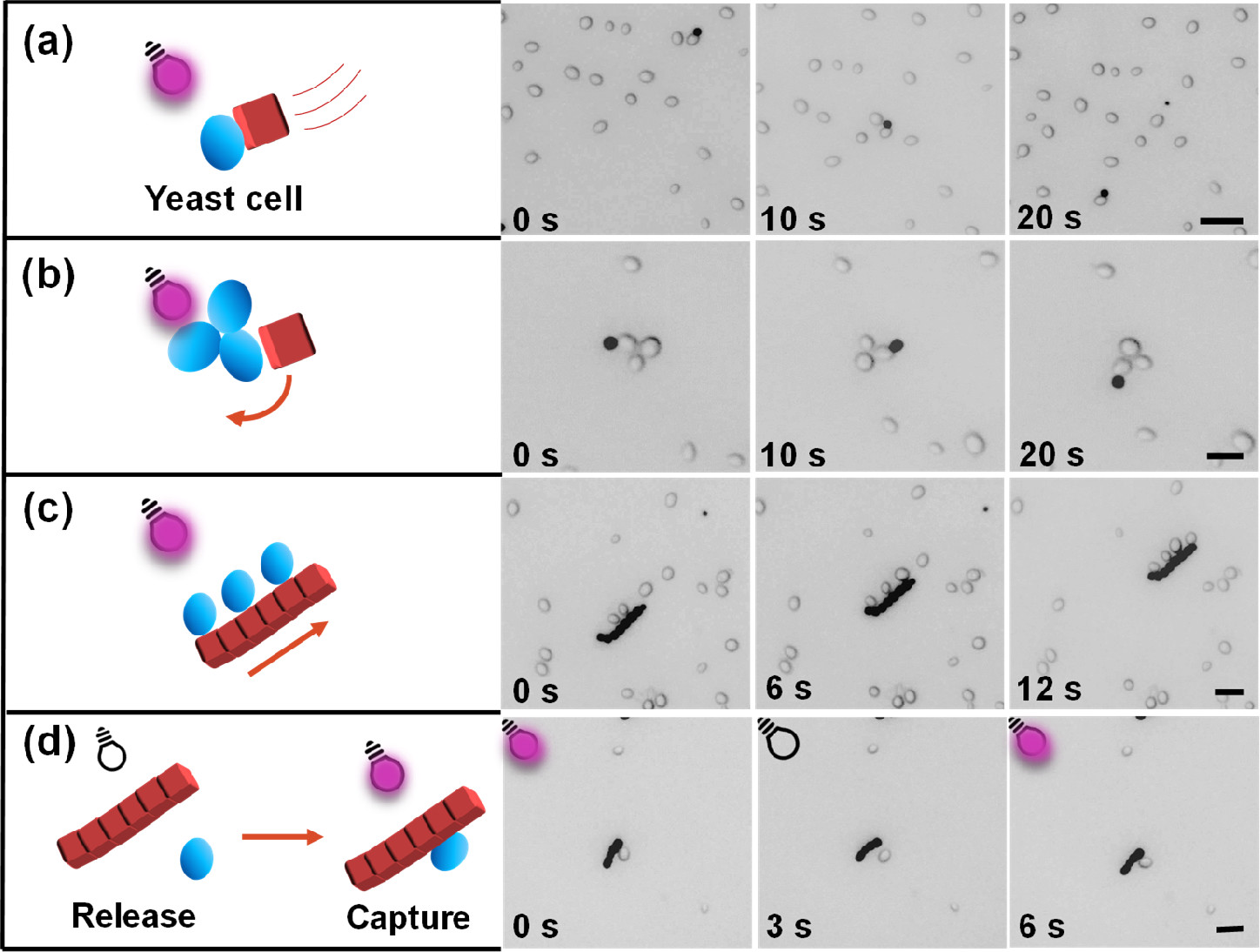
(2)根据单个微型机器人在组装过程中的相互取向,微链在光照下表现出不同的同步运动,这使得它们能够完成多项任务,包括捕获、拾取和运输微米级别的物体,如酵母细胞、从个人护理产品中提取的水中悬浮物,以及降解的聚合物材料。这种光驱动的自组装微链展示出小规模多任务人工机器人系统的创新合作行为,在货物捕获、运输和递送以及废水修复方面具有巨大潜力。
参考文献:
Xia Peng. et al. Shape-Controlled Self-Assembly of Light-Powered Microrobots into Ordered Microchains for Cells Transport and Water Remediation. ACS Nano. 2022
DOI:10.1021/acsnano.1c11136
https://doi.org/10.1021/acsnano.1c11136