
在液-气界面上的软机器人运动对于智能社会变得越来越重要。然而,现有的软机器人运动仅限于二维。由于不平衡的机械环境,在液-气两相界面实现三维运动(X、Y和Z轴)仍然是一个巨大的挑战。
近日,东华大学游正伟教授受爬甲虫幼虫Pyrrhalta的启发,提出了一种三相(液体-固体-空气)接触线的机制来解决上述挑战。
文章要点
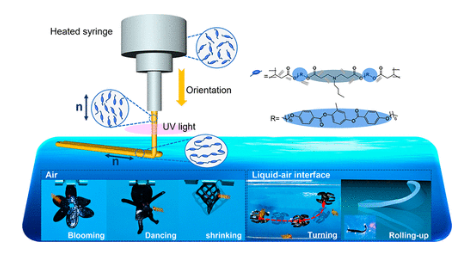
1)基于光响应液晶弹性体/碳纳米管复合材料的相应3D打印全软机器人(命名为larvobot)赋予了可重复的可编程变形和高度自由移动。
2)研究人员发展了在液-气界面上的三维运动,包括扭转和卷起。此外,通过对水下机器人固体表面的力学分析,建立了水下机器人的运动方程。同时,利用ANSYS计算应力分布,与推测相符。此外,软机器人在精确的时空控制下由光远程驱动,这为应用提供了很大的优势。
3)作为一个例子,研究人员展示了软机器人在封闭管道内的可控运动,这可以用于药物输送和智能运输。
参考文献
Yang Wang, et al, Meniscus-Climbing System Inspired 3D Printed Fully Soft Robotics with Highly Flexible Three-Dimensional Locomotion at the Liquid−Air Interface, ACS Nano, 2022
DOI: 10.1021/acsnano.2c09066
https://doi.org/10.1021/acsnano.2c09066


















