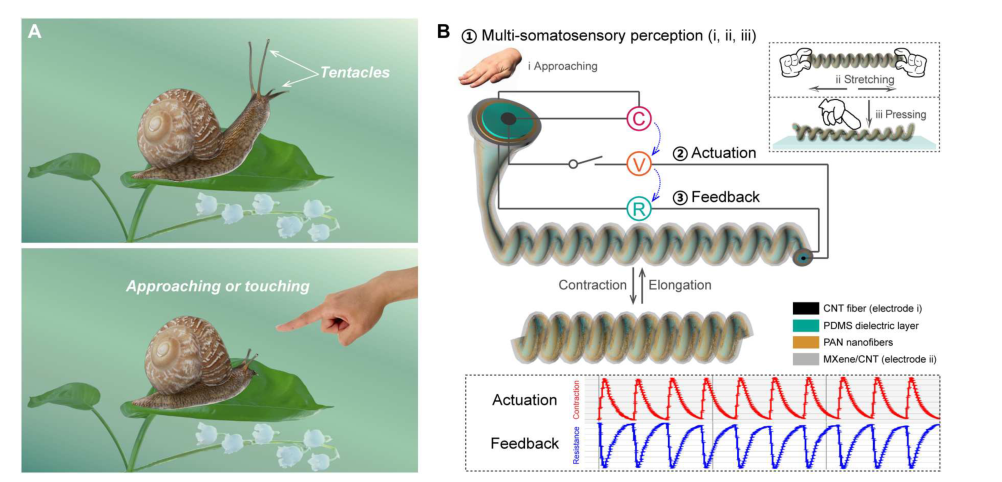
像蜗牛触手一样,将感觉集成到一种人造肌肉纤维中,用于环境适应和驱动路径追踪,这是非常必要的,但由于纤维的驱动和传感组件之间的接口不匹配,仍然具有挑战性。
近日,中科大Jiangtao Di,Qingwen Li报道了一种人工神经肌肉纤维,通过将碳纳米管(CNT)纤维芯依次包裹上弹性体层、纳米纤维网络和MXene/ CNT薄鞘,在弹性纤维中实现了巧妙的感觉-判断-行动智能系统。
文章要点
1)CNT/弹性体组件提供致动,并且护套由于其应变依赖电阻而能够实现触摸/拉伸感知和无滞后循环致动跟踪。
2)总的来说,同轴结构构建了一个电介质电容器,能够实现灵敏的无接触感知。
3)无缝集成的关键是使用纳米纤维接口,允许传感层自适应地跟踪但不限制驱动。
这项工作为未来智能软机器人的闭环控制提供了有前途的解决方案。
参考文献
Lizhong Dong, et al, Artificial neuromuscular fibers by multilayered coaxial integration with dynamic adaption, Sci. Adv. 8, eabq7703 (2022)
DOI: 10.1126/sciadv.abq7703
https://www.science.org/doi/10.1126/sciadv.abq7703


















