在许多必须执行传感、驱动和操纵的领域中,具有可编程和复杂形状变形的系统至关重要。生物体利用其身体结构成分的不均匀分布来实现不同的形状变形、运动和功能。然而,对于微型机器人的制造,这些设计往往涉及复杂的机器人体系结构,需要耗时和艰苦的制造过程。
近日,为了开发一种多任务的软模块化微机器人(MMR),北京理工大学Huaping Wang,Qiang Huang提出了一种用于单步制备具有不同3D构象和组成的软微机器人模块的各向异性电沉积方法。
文章要点
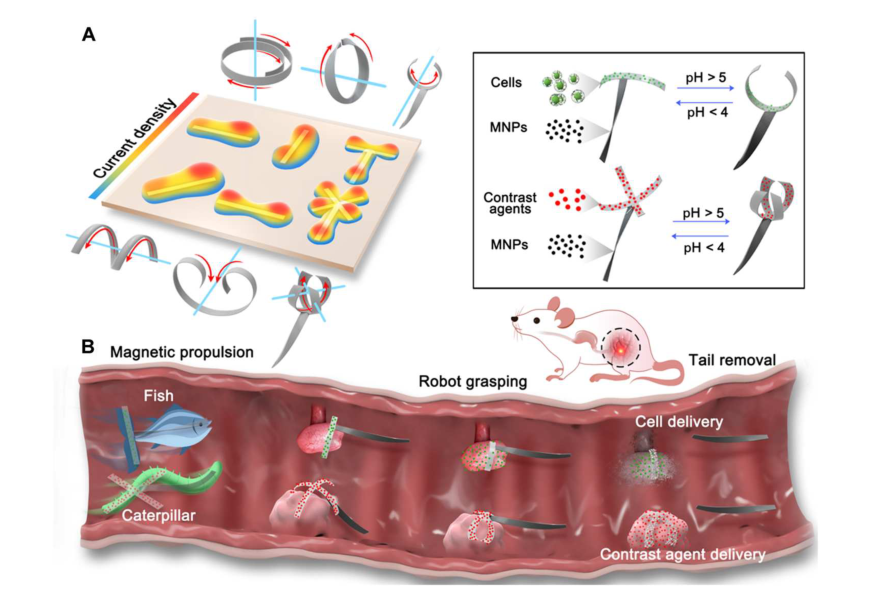
1)非均匀电沉积使用可编程的各向异性3D电场将复杂的异质交联密度嵌入到水凝胶网络中,这使得每个机器人片段都可以执行不同的形状变形(弯曲、扭曲和卷曲),并对外部刺激做出反应,如pH、离子和磁场。
2)通过将不同组成的液滴施加到各自的目标区域,非等电沉积可以在几秒钟内同时产生三个成分和形状变形行为不同的片段。可以建立有限元分析(FEA)来编程和预测电沉积结构的形状变形。
3)为了展示其可编程和模块化的形状变形能力,这些形状变形结构已被用于开发具有条纹、十字形和爪形的MMR。其中,用于传感和有效载荷递送的爪形MMR使用包含磁性颗粒的推进模块来实现可控运动和自适应形状变形,以及包含特定任务所需的生物功能细胞或染料的功能模块,如组织再生和药物递送。此外,推进模块可以准确地将生物相容的功能模块输送到靶区,功能模块通过与靶区的物理接触释放细胞或染料。随后,可以拆卸推进模块。
所提出的非等电沉积方法为开发更安全、更柔软、更智能、更高效和更集成的下一代微型机器人提供了一个新的方向。
参考文献
Zhiqiang Zheng, et al, Programmable aniso-electrodeposited modular hydrogel microrobots, Sci. Adv., 8 (50), eade6135.
DOI: 10.1126/sciadv.ade6135
https://www.science.org/doi/10.1126/sciadv.ade6135


















