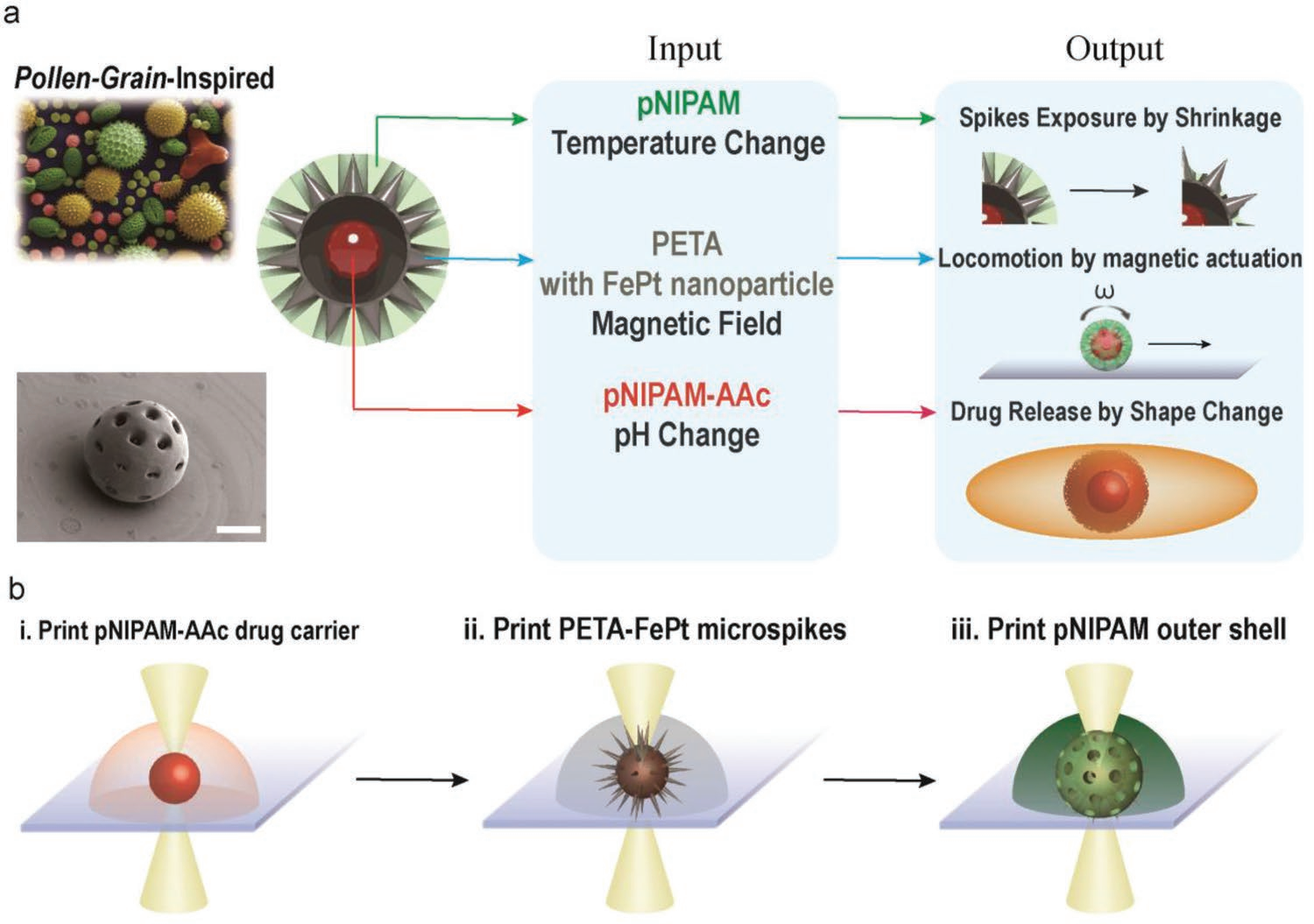
虽然大多数无线微型机器人能够通过多响应性来实现复杂的生物医学功能,但它们的功能执行仍强烈依赖于刺激输入的范围,这也严重限制了它们的功能多样性。此外,它们的响应功能往往彼此耦合,这也会导致任务操作发生重叠。有鉴于此,马克斯-普朗克智能系统研究所Metin Sitti构建了一种3D打印的多功能仿花粉粒微型机器人,其具有三种水凝胶成分:嵌入了铁铂(FePt)纳米颗粒的季戊四醇三丙烯酸酯(PETA),聚N-异丙基丙烯酰胺(pNIPAM)和聚N-异丙基丙烯酰胺丙烯酸(pNIPAM-AAc)。
本文要点:
(1)这些结构都具有各自的目标功能,即响应磁场以实现扭矩驱动的表面滚动和转向、实现对温度响应的按需表面附着(锚定)以及对pH响应的货物释放。
(2)这里实验结果表明,该多功能仿花粉粒微型机器人能够为构建未来医疗微型机器人提供重要的借鉴,并进一步提高其预期的性能和功能多样性。
Yun-Woo Lee. et al. Multifunctional 3D-Printed Pollen Grain-Inspired Hydrogel Microrobots for On-Demand Anchoring and Cargo Delivery. Advanced Materials. 2023
DOI: 10.1002/adma.202209812
https://onlinelibrary.wiley.com/doi/10.1002/adma.202209812


















