自传感致动器对于具有仿生本体/外感受特性的生物神经肌肉系统的人造机器人而言非常关键。现有的附加方法是将不同的传感器/致动器组件进行物理混合。由于它们的接口欠佳,附着力差以及电子/机械性能不匹配,因此无法产生令人满意的效果。有鉴于此,新加坡国立大学Swee Ching Tan、加州大学洛杉矶分校陈俊教授和吉林大学朱有亮副教授通过够建银聚合物骨架(SPF)而设计了一种单一的均匀材料平台,从而实现了传感-驱动的无缝统一。
本文要点:
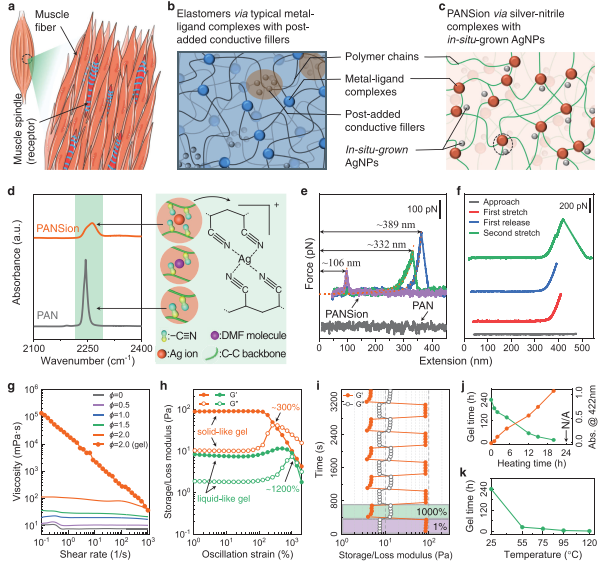
(1)该基于SPF的弹性体具有高度可拉伸性(1200%)、导电性(0.076 S m−1)和强度(0.76 MPa)。其中,可拉伸聚合物基体的合成和银纳米颗粒的原位还原是同时完成的。受益于其结构本身的多模态传感能力(机械和热),基于SPF的气动致动器能够实现自传感驱动(本体变形和外部刺激感知),并具有出色的承重属性(高达自身重量的3700倍),由此表明其能够在单一同质材料中实现传感-驱动特性的统一。
(2)鉴于SPF具有模拟人体肌肉系统的功能,因此其有望作为新一代功能组织,在包括人造皮肤,人机界面,自我传感机器人和其他动态材料等领域中发挥重要作用。
Songlin Zhang. et al. In Situ Grown Silver–Polymer Framework with Coordination Complexes for Functional Artificial Tissues. Advanced Materials. 2023
DOI: 10.1002/adma.202207916
https://onlinelibrary.wiley.com/doi/10.1002/adma.202207916


















