基于仿生学的具有多自由度和通信能力的软机器人近年来引起了人们的广泛关注。然而,目前具有多向运动的软机器人的解决方案集中在复杂的驱动模式上,并表现出应用上的不友好性。
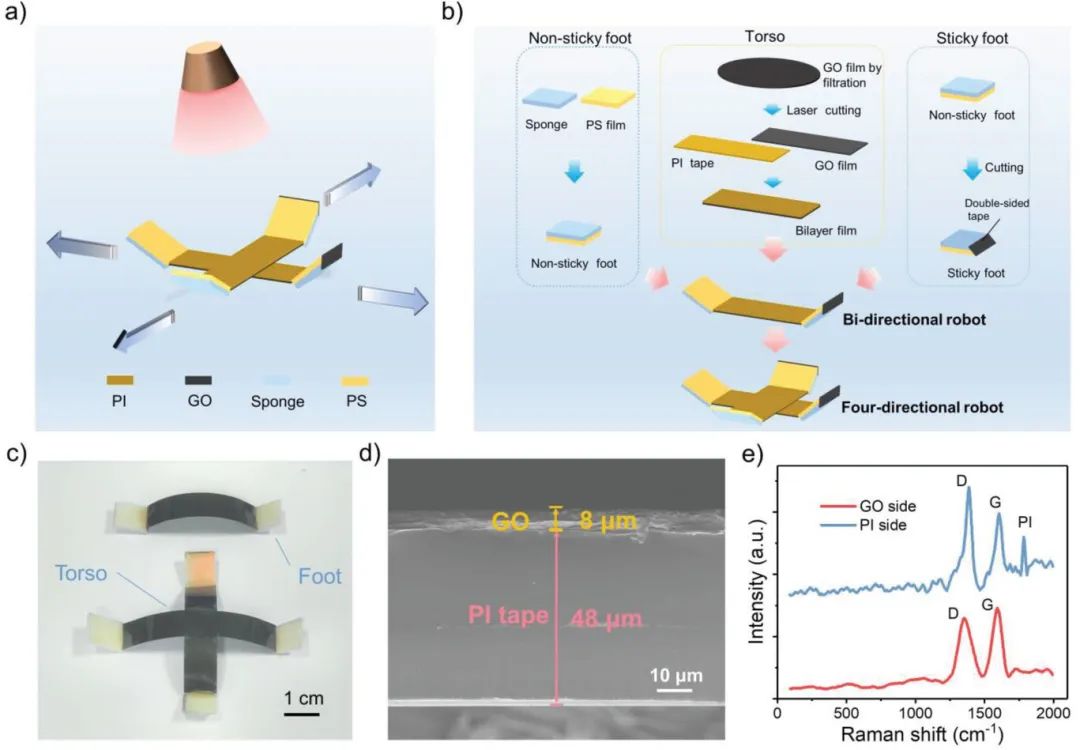
鉴于此,东南大学韩磊等人提出了一种集成了通信模块的无约束多向运动光驱动软爬行机器人,该机器人可以在固定的近红外光源下沿四个方向移动,并具有定位和感知能力。
本文要点:
1)由于氧化石墨烯的光热响应和巧妙的结构设计,机器人变形的临界状态可以简单地通过控制近红外光的持续时间来确定,最终产生不同的爬行方向。
2)此外,通信模块集成到机器人中,使机器人能够通过磁耦合定位和感测湿度。该机器人为多向运动软爬行机器人的设计和集成提供了一种创新策略,在智能机器人中显示出巨大的潜力。
参考文献:
Han, L., Si, J., Zhu, B., Wang, R., Wu, C., Guo, M., A Multidirectional Locomotion Light-Driven Soft Crawling Robot. Adv. Funct. Mater. 2023, 2305046.
https://doi.org/10.1002/adfm.202305046

















