在非结构化交互中对物体变形性的感知依赖于动觉和皮肤线索来适应物体的不确定性。然而,现有的触觉传感器无法提供足够的皮肤线索来自适应估计材料的柔软度,特别是在交互物体偏离弹性半无限体假设的非标准接触场景中。
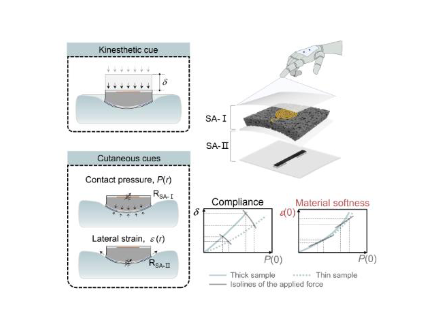
近日,上海交通大学Zhengchun Peng,深圳大学Ziya Wang提出了一种触觉传感器的创新设计,该传感器在软介质中集成了两个慢速适应机械感受器的功能,允许对接触界面内特定位置的局部压力和应变进行自解耦传感。
文章要点
1)通过利用这些局部皮肤信号,传感器可以准确、自适应地测量物体的材料柔软度,适应厚度和施加力的变化。
2)此外,当与机器人的动觉提示相结合时,传感器可以通过两个相关变形属性(包括材料柔软度和顺应性)的协同作用来增强触觉表达。
3)研究人员证明触觉信息的仿生融合可以充分理解物体的变形能力,从而促进机器人决策和灵巧操作。
参考文献
Waner Lin, et al, Self-adaptive perception of object’s deformability with multiple deformation attributes utilizing biomimetic mechanoreceptors, Adv. Mater. 2023
DOI: 10.1002/adma.202305032
https://doi.org/10.1002/adma.202305032


















