未来以可持续和生态友好的方式开发海洋资源需要具有类人感知的自主水下机器人。然而,由于缺乏足够的水下触觉传感技术,这种智能机器人的发展目前受到阻碍。
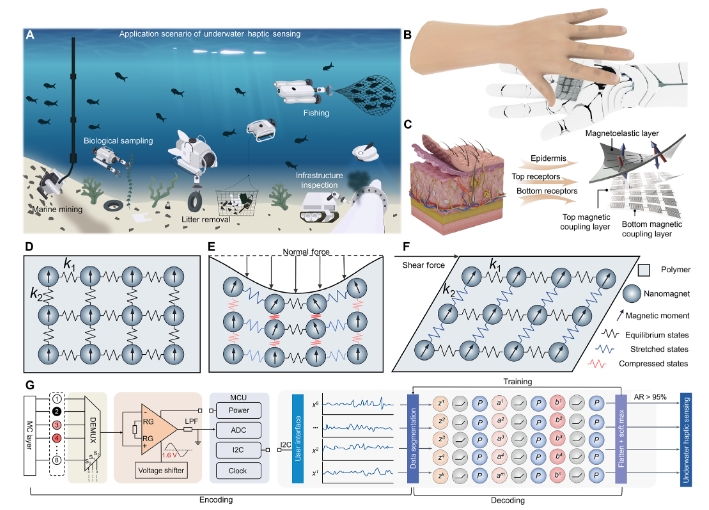
受人类触觉系统群体编码策略的启发,加州大学洛杉矶分校Jun Chen利用软聚合物系统中的巨磁弹性作为创新平台技术,构建了一种多模态水下机器人皮肤,用于海洋物体识别,具有内在的防水性和简单的配置。
文章要点
1)仿生磁弹性人造皮肤在每个紫杉醇中实现了多重触觉模式,并在识别七种海洋生物和海洋垃圾时获得了令人印象深刻的 95% 的分类率。
2)通过在水下触觉传感中引入另一个自由度,这项工作代表了可持续海洋资源开发的里程碑。
参考文献
Yihao Zhou, et al, A multimodal magnetoelastic artificial skin for underwater haptic sensing, Sci. Adv. 10 (1), eadj8567.
DOI: 10.1126/sciadv.adj8567
https://www.science.org/doi/10.1126/sciadv.adj8567


















