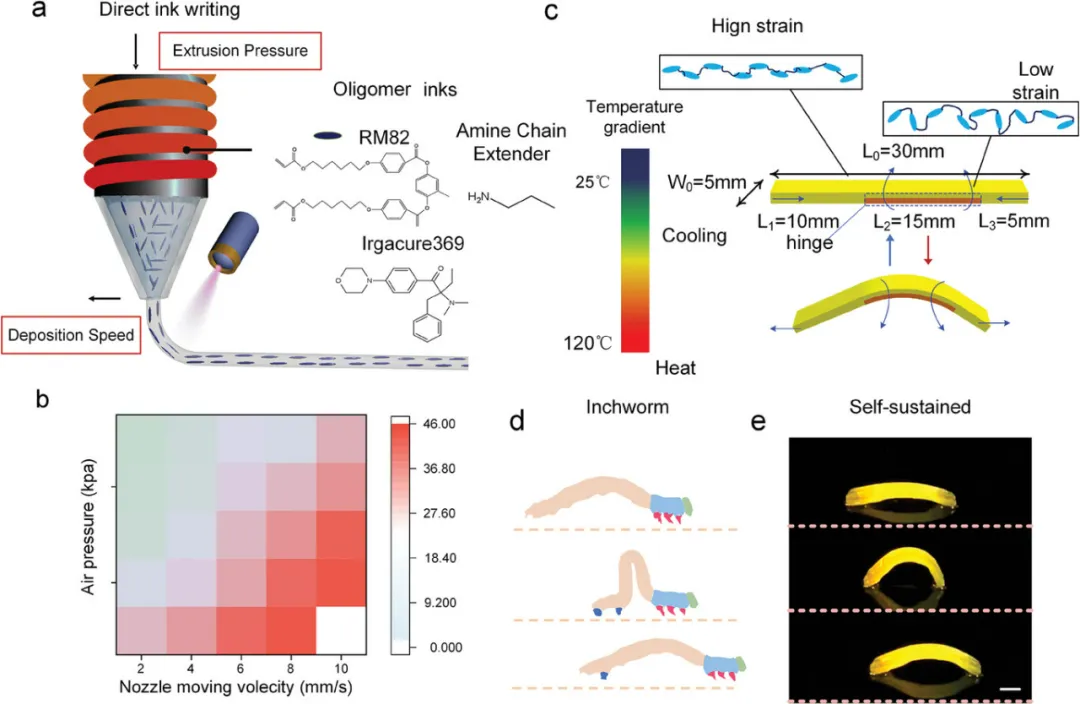
环境驱动的可持续自主运动是一种先进的智能行为,类似于生物有机体的无意识行为,如心跳和蠕动。在这项研究中,受软体动物爬行运动的启发,吉林大学宋正义、李冰倩等人介绍了一种具有偏心铰链结构的自持振荡软机器人。
本文要点:
1)采用参数编码的4D打印方法对偏心铰链结构的局部应变进行预编程,使软机器人在恒定的热场下具有可持续的爬行运动。通过衬底摩擦、偏心铰链结构和衬底温度的耦合设计,软机器人可以实现可调谐的爬行、滚动和振荡。
2)作者提出了两种应用,即光学斩波器和发电机,作为概念的证明。这项工作为软机器人在航空航天和医疗领域等受限环境中的应用提供了一个可行的解决方案。
参考文献:
L. Ren, et al., 4D Printed Self-Sustained Soft Crawling Machines Fueled by Constant Thermal Field. Adv. Funct. Mater. 2024, 2400161.
https://doi.org/10.1002/adfm.202400161

















